Inertial Measurement Unit
Inertial Measurment Unit (IMU) adalah modul sensor yang biasanya digunakan untuk orientasi benda termasuk robot.
Orientasi biasanya direpresentasikan dalam format Euler atau Quaternion. Format Euler lebih mudah untuk dipahami sedangkan format Quaternion lebih mudah untuk komputasi, seperti rotasi, dan transformasi.
Format Euler:
Roll (ϕ): rotasi terhadap sumbu X.
Pitch (θ): rotasi terhadap sumbu Y.
Yaw (ψ): rotasi terhadap sumbu Z.
Mungkin paling gampang untuk memahami apa itu IMU adalah sensor untuk mengukur sudut.
Sensor Penyusun IMU
IMU tidak bisa langsung mengukur orientasi/sudut. Di dalam modul IMU terdapat 3 jenis sensor:
Gyroscope: mengukur kecepatan angular (rad/s).
Accelerometer: mengukur percepatan linear (m/s²).
Magnetometer: mengukur medan magnet bumi (µT).
Setiap sensor tersebut bisa digunakan untuk menghitung sudut. Akan tetapi setiap jenis sensor tersebut memiliki kelebihan dan kekurangan masing-masing.
Gyroscope
Gyroscope sangat responsif terhadap perubaha gerak.
Kelebihan:
Mengukur laju perubahan sudut (angular rate) secara langsung.
Respons cepat dan sangat stabil untuk gerakan jangka pendek.
Tidak dipengaruhi gravitasi atau arah medan magnet.
Akurasi tinggi dalam mendeteksi rotasi cepat.
Kekurangan:
Drift: error terus bertambah meski sensor diam.
Noise meningkat pada frekuensi tinggi.
Accelerometer
Accelerometer mengukur sudut berdasarkan gravitasi bumi dan sangat akurat ketika diam.
Kelebihan:
Mengukur percepatan linear untuk mengukur sudut roll dan pitch dari gravitasi.
Tidak mengalami drift jangka panjang untuk orientasi statis.
Dapat mendeteksi gerakan translasi dan getaran.
Kekurangan:
Sangat sensitif terhadap noise dan getaran.
Estimasi orientasi hanya untuk roll dan pitch, tidak bisa menghitung yaw.
Saat sensor bergerak, percepatan gerak dan gravitasi tercampur, orientasi jadi tidak akurat.
Magnetometer
Magnetometer mengandalkan medan magnet bumi selayaknya kompas untuk mendapatkan data yaw.
Kelebihan:
Bisa memberikan heading (yaw) absolut berdasarkan medan magnet bumi.
Tidak mengalami drift seperti gyroscope.
Kekurangan
Sangat sensitif terhadap gangguan magnetik dari logam dan medan magnet lokal.
Noise cukup tinggi jika lingkungan banyak logam.
Tidak bisa mengukur roll dan pitch dengan akurat.
Contoh Modul IMU
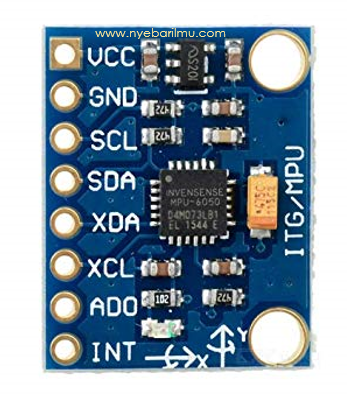
MPU6050
MPU6050 (6-DOF) murah dan bagus kalau tau cara pakainya wkwk. Modul ini hanya terdiri dari Gyroscope dan Accelerometer. Versi yang ada Magnetometernya adalah MPU9250 (9-DOF).
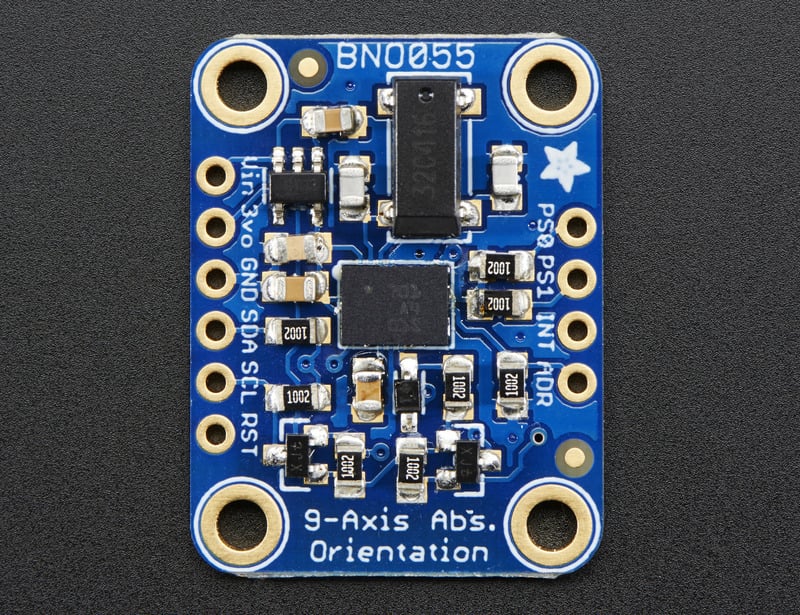
BNO055
BNO055 adalah sensor yang diproduksi oleh Bosch Sensortec. Sensor ini memiliki sensor yang jauh lebih akurat daripada MPU6050 dan memiliki processor di dalamnya untuk sensor fusion. Oleh karena itu, data orientasi bisa langsung didapatkan secara akurat tanpa perlu melakukan perhitungan manual.
External Resource
Visualisasi hasil orientasi IMU: https://www.youtube.com/shorts/Wdof9bvGXQU
Visualisasi penerapan pada robot: https://youtu.be/jF6dE3skI28