URDF (Unified Robot Description Format)
URDF (Unified Robot Description Format) adalah format file standar yang digunakan untuk mendeskripsikan geometri, struktur, dan hubungan antarbagian robot dalam sistem ROS.
Documentation
URDF Tutorial: https://docs.ros.org/en/jazzy/Tutorials/Intermediate/URDF/URDF-Main.html
URDF Tutorial Repository: https://github.com/ros/urdf_tutorial/tree/ros2
URDF Sim Tutorial Repo: https://github.com/ros/urdf_sim_tutorial/tree/ros2
note: imo kedua repo tersebut bukan best practice. seperti lompat2 kalau belum paham.
Understanding From Scratch
Dependencies
Package yang digunakan:
robot_state_publisherjoint_state_publisher_guirviz2xacro
Cara install:
sudo apt install ros-$ROS_DISTRO-robot-state-publisher ros-$ROS_DISTRO-joint-state-publisher-gui ros-$ROS_DISTRO-rviz2 ros-$ROS_DISTRO-xacro
Tutorial
Asumsi sekarang berada di dalam src workspace.
cd ~/ros2_ws/src
Buat package baru. Usahakan format namanya adalah {robot_name}_description. Package boleh berformat ament_cmake atau ament_python. Tutorial ini pakai ament_cmake.
ros2 pkg create robot_description --build-type ament_cmake
Masuk ke dalam package (direktori) yang telah dibuat. Di dalam package susunannya seperti ini:
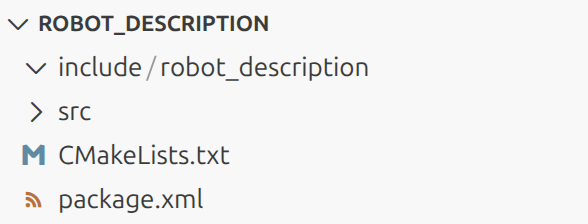
Package ini hanya berfungsi untuk mendefinisikan 3D dari robot dan tidak digunakan untuk membuat program. Karena itu, direktori include, dan src dihapus. Kemudian buat direktori baru bernama urdf sehingga susunannya sekarang:
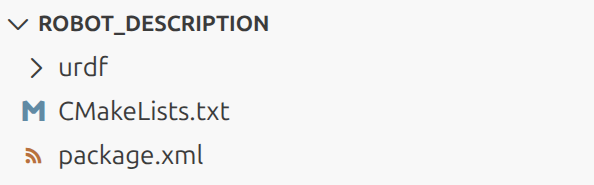
Buat file baru di dalam direktori urdf bernama 01-myfirst.urdf. File URDF ini berisikan deskripsi dari robot berformat XML. Kode berasal dari Tutorial URDF ROS2:
<?xml version="1.0"?>
<robot name="myfirst">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
</visual>
</link>
</robot>
Jalankan robot_state_publisher dengan asumsi sekarang berada di ~/ros2_ws/src/robot_description.
ros2 run robot_state_publisher robot_state_publisher --ros-args -p robot_description:="$(cat urdf/01-myfirst.urdf)"
Di terminal lain, jalankan rviz2.
rviz2 # ros2 run rviz2 rviz2
Maka akan terbuka window: